









Adafruit Motore CC N20 con encoder magnetico - 6 V con rapporto di trasmissione 1:150
Descrizione
Il primo passo in un progetto di robotica consiste nel far girare un motore, rilevando le variazioni di velocità dovute a tensione, ambiente e differenze di fabbricazione. Per misurare con precisione la velocità del motore, è possibile collegare un encoder a ruota, insieme a un contatore ottico o magnetico. Questa combinazione consente al microcontrollore di contare i raggi che passano e di determinare la velocità in modo efficiente.
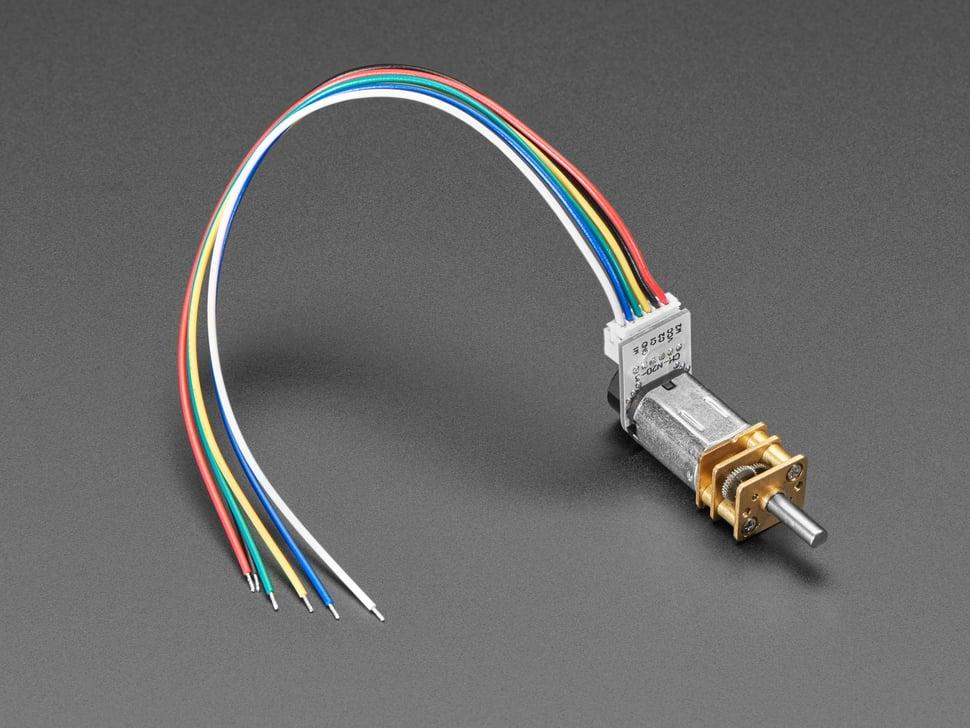
Migliora la tua configurazione aggiungendo un secondo contatore per rilevare la direzione e la velocità, semplificando il processo grazie al nostro motore appositamente progettato. Questo motore, non solo compatto nelle dimensioni standard N20, è dotato di una ruota magnetica e di due sensori a effetto Hall pre-installati, garantendo un'integrazione perfetta.
Il motore funziona in modo ottimale con un'alimentazione da 4,5 a 6 V CC tramite i fili bianco e rosso, che si collegano al driver del motore e consentono la regolazione della velocità tramite PWM con un ponte H. Collega a terra il filo blu al microcontrollore, fornisci 3-5 V CC al filo nero e leggi le uscite a effetto Hall dai fili giallo e verde per un feedback preciso.
È disponibile uno sketch di esempio per Arduino , adattabile ad altri linguaggi di programmazione, che utilizza interrupt sui pin dell'encoder per calcolare la velocità. Questo motore presenta un rapporto di trasmissione di 1:150, richiede una potenza nominale di 6 V e assorbe circa 100 mA, con un picco di 200 mA in fase di stallo. Il rapporto di trasmissione regola coppia e giri al minuto senza influire sull'assorbimento di corrente, garantendo versatilità in diverse applicazioni.
Proprietà
| Marca | Adafruit |
| Modello | 4640 |
L'ETA non è noto
 Adafruit Motore CC N20 con encoder magnetico - 6 V con rapporto di trasmissione 1:150 € 15,65
Adafruit Motore CC N20 con encoder magnetico - 6 V con rapporto di trasmissione 1:150 € 15,65 Domande dei clienti
recensioni dei clienti
- disponibile Adafruit Modulo di retroilluminazione a LED bianco - Medio 23 mm x 75 mm € 3,30 Visualizza prodotto
- disponibile Adafruit Set di cavi di alimentazione CC impermeabili - 5,5/2,1 mm € 3,30 Visualizza prodotto
- disponibile Adafruit Interruttore a scorrimento SPDT compatibile con breadboard € 1,30 Visualizza prodotto
- disponibile Adafruit Piccolo piezo chiuso con fili € 1,30 Visualizza prodotto
- disponibile Adafruit Mini altoparlante in metallo con fili - 8 ohm 0,5 W € 2,55 Visualizza prodotto
- disponibile Adafruit Cavo JST PH a 2 pin – Connettore maschio 200 mm € 1,05 Visualizza prodotto
- disponibile Adafruit Piccolo morsetto a coccodrillo per cavo di collegamento maschio - 6 pezzi € 6,50 Visualizza prodotto
- disponibile Adafruit NOOds - Filamento LED flessibile - 3V lungo 300mm - Verde lime € 8,85 Visualizza prodotto
- disponibile Adafruit NOOds - Filamento LED flessibile - 3V lungo 300mm - Bianco caldo € 5,80 Visualizza prodotto
- disponibile Adafruit Tessuto conduttivo intrecciato - 20 cm quadrati € 6,30 Visualizza prodotto
- disponibile Adafruit nOOds singolo capo - Filamento LED flessibile lungo 128mm - Blu 3V € 5,05 Visualizza prodotto
- disponibile Adafruit Micro Lipo - Caricatore USB LiIon/LiPoly € 7,60 Visualizza prodotto
- 5 pieces disponibile Adafruit NeoPixel Diffused 5mm LED passante - Confezione da 5 € 6,30 Visualizza prodotto
- disponibile Adafruit Set di altoparlanti stereo chiusi - 3 W 4 Ohm € 9,35 Visualizza prodotto
- disponibile Caricabatterie USB /DC/solare Adafruit bq25185 con scheda Buck da 3,3 V € 11,35 Visualizza prodotto
Elementi visualizzati di recente
- Adafruit Motore CC N20 con encoder magnetico - 6 V con rapporto di trasmissione 1:150 € 15,65 Visualizza prodotto
- Adafruit Cacciavite a stella/pentalobo a 5 punte in alluminio per iPhone 4S da 0,8 mm € 12,60 Visualizza prodotto
- Adafruit Mi piace molto METRIC - Adesivo! € 1,30 Visualizza prodotto
- Adafruit PCB breakout SMT per SOIC-12 o TSSOP-12 - Confezione da 6! € 6,30 Visualizza prodotto
- Adafruit Kit fai da te per orologio TIMESQUARE - Matrice display blu € 48,65 Visualizza prodotto
- Adafruit Kit per auto solare Volta Racers - Grigio € 25,- Visualizza prodotto
- Adafruit Barre da 75 mm - Pixel LED RGB digitali da 12 V (filo da 21) € 62,05 Visualizza prodotto
- Adafruit Alimentatore switching 5V 2,5A con cavo MicroUSB 20AWG € 10,35 Visualizza prodotto
- Adafruit USB Charger Doctor - Misuratore di tensione e corrente in linea € 9,35 Visualizza prodotto
- Adafruit Filamento PLA per stampanti 3D - Diametro 3 mm - Blu - 1 kg € 57,- Visualizza prodotto
- Adafruit Distanziali in ottone M2.5 per Pi HAT - Placcati neri - Confezione da 2 € 1,05 Visualizza prodotto
- Adafruit Hub USB 2.0 ed Ethernet - 3 porte USB e 1 Ethernet € 21,70 Visualizza prodotto
- Adafruit Interruttori a chiave meccanici Kailh - Clicky Blu Navy - Confezione da 10 € 12,35 Visualizza prodotto
- Adafruit Coppia di cavi corrispondenti a 6 pin con passo da 2,0 mm - Compatibile con JST PH € 1,30 Visualizza prodotto
- Adafruit Dissipatore di calore in alluminio Raspberry Pi 5 € 15,65 Visualizza prodotto