









Adafruit Motore CC N20 con encoder magnetico - 6 V con rapporto di trasmissione 1:298
Descrizione
Il primo passo in un progetto di robotica è far girare un motore. Non tutti i motori girano alla stessa velocità a causa di variazioni di tensione, ambiente e produzione. Per determinare la velocità del motore, è necessario utilizzare un encoder con un contatore ottico o magnetico per contare le rotazioni.
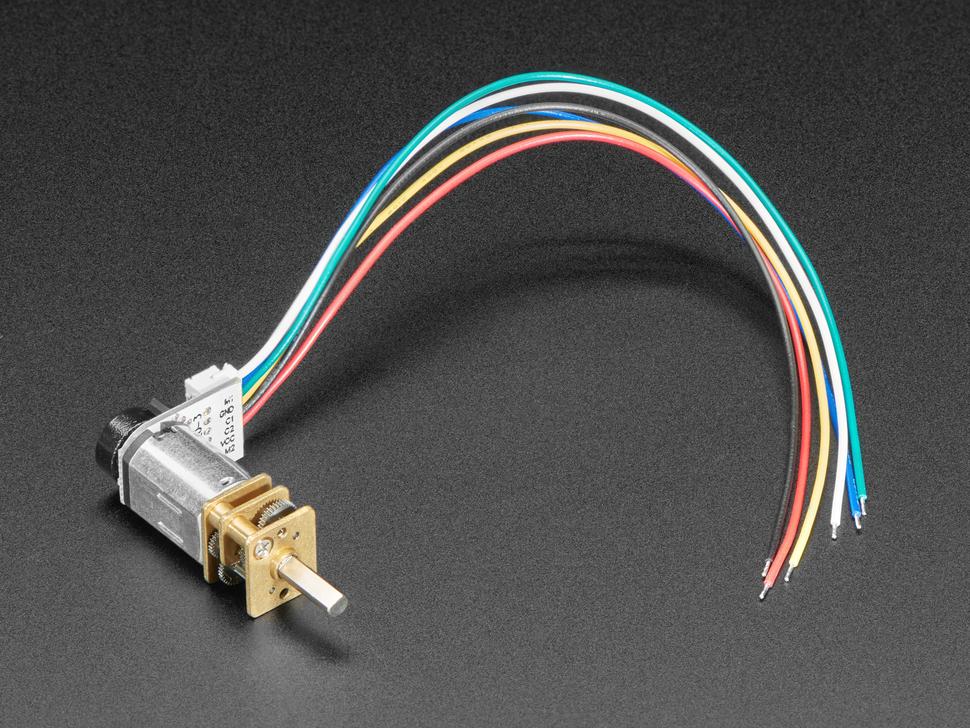
Questo motore semplifica il processo grazie a una ruota magnetica integrata e due sensori ad effetto Hall, eliminando così la complessità del cablaggio. È compatto, si adatta alle dimensioni standard N20 e funziona in modo efficiente con tensioni da 4,5 a 6 V CC. I collegamenti sono semplici: fili bianco e rosso per il pilotaggio del motore, supporto PWM per la regolazione della velocità, filo blu per la massa e filo nero per l'alimentazione. I fili giallo e verde forniscono le uscite dell'encoder.
È disponibile uno sketch Arduino di esempio, adattabile ad altri linguaggi, per il conteggio degli interrupt e il calcolo della velocità utilizzando un rapporto di trasmissione di 1:298. Il motore utilizza una potenza nominale di 6 V, assorbendo circa 100 mA (200 mA in stallo); la variazione del rapporto di trasmissione influisce sulla coppia e sui giri al minuto, non sull'assorbimento di corrente.
Proprietà
| Marca | Adafruit |
| Modello | 4641 |
Consegnato in 10 a 12 giorni
 Adafruit Motore CC N20 con encoder magnetico - 6 V con rapporto di trasmissione 1:298 Consegnato in 10 a 12 giorni € 19,70
Adafruit Motore CC N20 con encoder magnetico - 6 V con rapporto di trasmissione 1:298 Consegnato in 10 a 12 giorni € 19,70 Domande dei clienti
recensioni dei clienti
- Ridotto disponibile -49 % Adafruit Modulo di retroilluminazione a LED bianco - Piccolo 12 mm x 40 mm € 2,75 € 1,40 Visualizza prodotto
- Ridotto disponibile -50 % Adafruit Scheda breakout ad angolo retto SMT a 2 pin JST-PH € 2,10 € 1,05 Visualizza prodotto
- Ridotto disponibile -49 % Adafruit Mini altoparlante in metallo con fili - 8 ohm 0,5 W € 2,75 € 1,40 Visualizza prodotto
- Ridotto disponibile -49 % Adafruit Intestazioni di impilamento per Feather - Intestazioni femmina a 12 e 16 pin € 1,75 € 0,90 Visualizza prodotto
- Ridotto 3 pieces disponibile -50 % Adafruit Filamento LED - 3V 26mm di lunghezza - Bianco caldo - Confezione da 3 € 6,40 € 3,20 Visualizza prodotto
- Ridotto disponibile -49 % Adafruit Filamento LED flessibile a un'estremità - 3V lungo 25mm - Verde € 3,55 € 1,80 Visualizza prodotto
- Ridotto disponibile -50 % Adafruit NOOds - Filamento LED flessibile - 3V lungo 300mm - Giallo € 10,55 € 5,25 Visualizza prodotto
- Ridotto disponibile -50 % Adafruit Ultimate GPS HAT per Raspberry Pi A+/B+/Pi 2/3/4/Pi 5 € 42,05 € 21,05 Visualizza prodotto
- Ridotto disponibile -50 % Adafruit Set di cavi a 4 fili polarizzati impermeabili € 3,50 € 1,75 Visualizza prodotto
- Ridotto disponibile -50 % Adafruit Sensore di interruzione del raggio IR con estremità del connettore del cavo di alta qualità - LED da 5 mm € 8,35 € 4,20 Visualizza prodotto
- Ridotto disponibile -49 % Adafruit Altoparlante - Diametro 3" - 4 Ohm 3 Watt € 2,75 € 1,40 Visualizza prodotto
- Ridotto disponibile -49 % Adafruit Set di cavi di alimentazione CC impermeabili - 5,5/2,1 mm € 3,55 € 1,80 Visualizza prodotto
- Ridotto disponibile -50 % Adafruit NOOds - Filamento LED flessibile - 3V lungo 300mm - Rosso € 10,55 € 5,30 Visualizza prodotto
- Ridotto disponibile -50 % Adafruit Tessuto conduttivo intrecciato - 20 cm quadrati € 6,95 € 3,50 Visualizza prodotto
- Ridotto 10 pieces disponibile -50 % Adafruit Intestazione maschio con striscia a 36 pin staccabile da 0,1" - Confezione da 10 combo arcobaleno € 6,95 € 3,50 Visualizza prodotto