









Driver motore ad alta potenza Pololu Dual G2 18v18 per Raspberry Pi (assemblato)
Descrizione Sinistra Allegati
Questa scheda aggiuntiva semplifica il controllo di due motori CC ad alta potenza con un Raspberry Pi. I suoi doppi ponti H MOSFET discreti supportano un ampio intervallo operativo da 6,5 V a 30 V e sono sufficientemente efficienti da fornire 18 A continui senza dissipatore di calore. I driver offrono funzionalità di limitazione della corrente di base e accettano frequenze PWM ultrasoniche per un funzionamento più silenzioso. Le mappature predefinite dei pin facilitano l'avvio, ma possono essere personalizzate per applicazioni più specializzate. Questa versione viene fornita completamente assemblata con connettori saldati.
La tensione operativa minima per tutte e quattro le versioni è di 6,5 V, mentre le tensioni operative massime sono riportate nella tabella sopra. La scheda include anche un regolatore step-down switching integrato da 5 V, 2,5 A che può essere utilizzato per alimentare il Raspberry Pi a cui è collegato, consentendo il funzionamento da un singolo alimentatore.
La configurazione predefinita del driver utilizza sei pin GPIO per controllare i driver del motore, utilizzando le uscite PWM hardware del Raspberry Pi e utilizza due pin aggiuntivi per leggere le uscite di stato dai driver. Tuttavia, le mappature dei pin possono essere personalizzate se le impostazioni predefinite non sono convenienti e i pin per il rilevamento e la limitazione della corrente sono accessibili sulla scheda per applicazioni più avanzate.
La scheda corrisponde alle specifiche meccaniche Raspberry Pi HAT (Hardware Attached on Top), sebbene non sia conforme alle specifiche HAT complete a causa della mancanza di una EEPROM ID. (È disponibile un footprint per aggiungere la propria EEPROM per le applicazioni in cui una sarebbe utile; sono forniti pull-up su SDA, SCL e WP.) Non è pratico utilizzare questa scheda di espansione con il Raspberry Pi Model A o Model originale B a causa delle differenze nella piedinatura e nel fattore di forma.
Questi driver a doppio motore sono disponibili anche come shield Arduino. Per le versioni a canale singolo in un fattore di forma più compatto, prendi in considerazione i nostri driver per motori ad alta potenza. Per alternative più piccole, a basso consumo e a basso costo progettate per un Raspberry Pi, prendi in considerazione il nostro driver motore doppio MC33926 per Raspberry Pi, il driver motore doppio MAX14870 per Raspberry Pi e il driver motore doppio DRV8835 per Raspberry Pi.
Caratteristiche comuni a tutte le versioni
- Funzionamento PWM fino a 100 kHz
- I LED indicatori del motore mostrano cosa stanno facendo le uscite anche quando nessun motore è collegato
- Il regolatore di tensione step-down switching integrato da 5 V, 2,5 A alimenta la base Raspberry Pi per il funzionamento con alimentazione singola
- Libreria Python semplifica l'utilizzo di questa scheda come scheda di espansione del driver del motore
- Le mappature dei pin GPIO possono essere personalizzate se le mappature predefinite non sono convenienti
- I pin di rilevamento e limitazione della corrente sono esposti per un uso avanzato
- Protezione contro l'inversione di tensione
- Spegnimento per sottotensione
- Protezione da cortocircuito
Dettagli per questo articolo #3751
- Tensione di esercizio: da 6,5 V a 30 V (massimo assoluto; non destinato all'uso con batterie da 24 V)
- Corrente di uscita: 18 A continui
- Limitazione della corrente attiva (chopping) con soglia predefinita approssimativa di 50 A (può essere regolata più in basso)
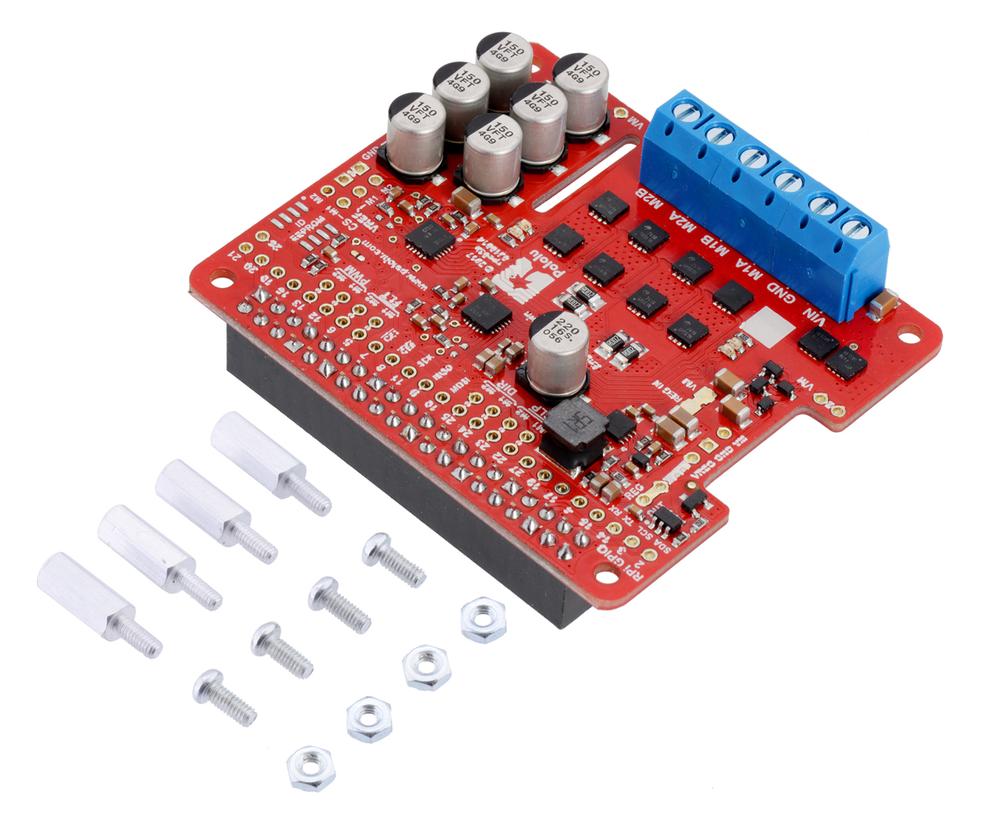
Questa versione del 18v18 il conducente del motore è completamente assemblato, con un'intestazione femmina da 2 × 20 pin da 0,1 "(per l'interfaccia Raspberry Pi) e una striscia a sei pin di morsettiere da 5 mm (per l'alimentazione della scheda e le uscite del motore) saldate. Si distingue dalle altre versioni per suo rosso PCB e il numero 150 in cima ai sei alti condensatori elettrolitici d'argento all'angolo della scheda. (Vedi articolo #3750 per una versione in kit con connettori inclusi ma non saldati.)
Sono inclusi quattro distanziatori M2.5 (lunghezza 11 mm), viti e dadi per fissare la scheda al Raspberry Pi all'altezza corretta per il connettore GPIO.
I blocchi di cortocircuito e le intestazioni maschio da 0,1 "(non incluse) possono essere utilizzati per apportare alcune delle modifiche opzionali più avanzate alla scheda, come la rimappatura dei pin di controllo.
Il driver del motore include sei condensatori di potenza elettrolitici da 100 μF o 150 μF e c'è spazio per aggiungere ulteriori condensatori (ad esempio per compensare cavi di alimentazione lunghi o aumentare la stabilità dell'alimentazione). Di solito non sono necessari condensatori di potenza aggiuntivi e non sono inclusi condensatori aggiuntivi con questo driver del motore.
Un Raspberry Pi lo è non incluso.
Potenza
Un'adeguata alimentazione del motore deve essere collegata ai grandi pad VIN e GND del driver del motore. La scheda include un circuito di protezione contro la tensione inversa che aiuta a prevenire danni nel caso in cui l'alimentazione del motore sia collegata al contrario. È possibile accedere alla tensione di ingresso protetta da inversione per l'utilizzo in altri circuiti tramite i due pin etichettati VM sul lato sinistro della scheda. Per impostazione predefinita, l'alimentatore del motore alimenta anche un regolatore step-down a commutazione da 5 V, 2,5 A che fornisce alimentazione al Raspberry Pi collegato.
Un circuito a diodi ideale su questa scheda impedisce alla corrente inversa di fluire nell'alimentazione a 5 V della scheda del driver del motore se il Raspberry Pi è alimentato separatamente (ad esempio, tramite la sua presa di alimentazione USB). Tuttavia, a partire dal Raspberry Pi 3 Model B+, non esiste un circuito a diodi ideale corrispondente sull'ingresso di alimentazione USB del Raspberry Pi, quindi è possibile che la scheda driver esegua il backfeed di un adattatore di alimentazione USB attraverso il Raspberry Pi. Di conseguenza, non consigliamo di collegare l'alimentazione USB esterna al Raspberry Pi mentre è alimentato tramite il driver del motore.
Il backfeeding non è un problema con le versioni precedenti di Raspberry Pi, che hanno un circuito a diodi sull'ingresso di alimentazione USB. Con le versioni Raspberry Pi precedenti al Pi 3 B+, è sicuro avere un alimentatore diverso collegato al Raspberry Pi tramite la sua presa USB mentre il driver del motore è collegato e alimentato.
Se vuoi alimentare il Raspberry Pi separatamente, il regolatore può essere disconnesso tagliando due tracce esposte sulla scheda: una tra i pad a montaggio superficiale etichettati "VM" e "REG IN", e un'altra tra i due pin vicino al " REG OUT”, come mostrato a destra. Nelle versioni 24v14 e 24v18, scollegando il regolatore si aumenta la tensione massima assoluta di funzionamento della scheda a 40 V.
Opzioni di controllo del motore
Con il pin PWM mantenuto basso, entrambe le uscite del motore verranno mantenute basse (un'operazione di frenatura). Con PWM alto, le uscite del motore saranno pilotate in base all'ingresso DIR. Ciò consente due modalità di funzionamento: segno-magnitudine, in cui il ciclo di lavoro PWM controlla la velocità del motore e DIR controlla la direzione, e bloccato-antifase, in cui un segnale modulato in larghezza di impulso viene applicato al pin DIR con PWM tenuto alto.
Nel funzionamento antifase bloccato, un ciclo di lavoro basso aziona il motore in una direzione e un ciclo di lavoro alto aziona il motore nell'altra direzione; un ciclo di lavoro del 50% spegne il motore. Un'implementazione corretta dell'antifase bloccata dipende dall'induttanza del motore e dalla frequenza di commutazione che uniformano la corrente (ad esempio rendendo la corrente zero nel caso del ciclo di lavoro del 50%), quindi potrebbe essere necessaria un'elevata frequenza PWM.
Frequenza PWM
Il driver del motore supporta frequenze PWM fino a 100 kHz, ma si noti che le perdite di commutazione nel driver saranno proporzionali alla frequenza PWM. In genere, circa 20 kHz è una buona scelta per il funzionamento in ampiezza del segno poiché è sufficientemente alto da essere ultrasonico, il che si traduce in un funzionamento più silenzioso.
Un impulso sul pin PWM deve essere alto per una durata minima di circa 0,5 µs prima che le uscite si attivino per la durata corrispondente (qualsiasi impulso di ingresso più breve non produce un cambiamento sulle uscite), quindi i cicli di lavoro bassi non sono disponibili alle alte frequenze . Ad esempio, a 100 kHz, il periodo dell'impulso è di 10 µs e il ciclo di lavoro minimo diverso da zero ottenibile è 0,5/10 o 5%.
Condizioni di guasto
Il driver del motore può rilevare diversi stati di guasto che segnala portando il pin FLT in basso; questa è un'uscita open-drain che dovrebbe essere portata alla tensione logica del tuo sistema. I guasti rilevabili includono cortocircuiti sulle uscite, sottotensione e sovratemperatura. Tutti i guasti disabilitano le uscite del motore ma non sono bloccati, il che significa che il driver tenterà di riprendere il funzionamento quando la condizione di guasto viene rimossa (o dopo un ritardo di alcuni millisecondi nel caso del guasto di cortocircuito). L'errore di sovratemperatura fornisce una debole indicazione che la scheda è troppo calda, ma non indica direttamente la temperatura dei MOSFET, che di solito sono i primi componenti a surriscaldarsi, quindi non dovresti contare su questo errore per evitare danni da surriscaldamento -condizioni di temperatura.
Perni di rimappatura
Tutti i pin GPIO di Raspberry Pi sono suddivisi lungo una fila di fori passanti numerati appena sotto il connettore GPIO a 40 pin. Ogni pin GPIO utilizzato dalla scheda è collegato da questa riga al corrispondente pin del driver del motore tramite una traccia sul lato superiore della scheda che attraversa la coppia di fori. Se vuoi rimappare uno di questi pin del driver del motore, puoi tagliarne la traccia con un coltello e quindi far passare un filo dal foro inferiore a un nuovo pin GPIO.
Si noti che le mappature predefinite dei pin sono state scelte in modo che i pull-up e i pull-down GPIO predefiniti del Raspberry Pi corrispondano alla direzione in cui i pin del driver del motore sono o dovrebbero essere tirati (su per SF, giù per altri); se rimappate i pin del driver del motore senza prestare attenzione a questo, potreste riscontrare problemi con i pin tirati nel modo sbagliato. Vedi il Documentazione Raspberry Pi per ulteriori informazioni sugli stati GPIO predefiniti.
Rilevamento e limitazione di corrente
Il driver del motore espone i pin di rilevamento e limitazione della corrente che non sono collegati al Raspberry Pi, ma sono accessibili attraverso i propri fori passanti nel caso in cui si desideri utilizzarli in un'applicazione più avanzata.
Il driver ha la capacità di limitare la corrente del motore attraverso il taglio di corrente: una volta che la corrente di azionamento del motore raggiunge una soglia impostata, il driver entra in modalità freno (decadimento lento) per circa 25 μs prima di applicare potenza per azionare nuovamente il motore. Ciò rende più pratico l'utilizzo del driver con un motore che potrebbe assorbire solo pochi ampere durante il funzionamento ma può assorbire molte volte quella quantità (decine di ampere) all'avvio.
Su questa scheda (18v18), la soglia di limitazione della corrente nominale è impostata di default a circa 50 A. Per ogni canale del motore, è possibile abbassare il limite collegando un resistore aggiuntivo tra il pin VREF e il pin GND adiacente; il grafico sottostante mostra come il limite di corrente è correlato al valore del resistore VREF. Ad esempio, l'aggiunta di un resistore da 100 kΩ tra VREF e GND riduce il limite di corrente a circa 29 A. Si noti che la soglia di limitazione della corrente non è molto precisa ed è meno accurata con impostazioni particolarmente basse (indicate dalla parte tratteggiata della curva) .
I pin di rilevamento della corrente del driver, etichettati CS, emettono tensioni proporzionali alle correnti del motore mentre i ponti H stanno guidando. La tensione di uscita per questa versione è di circa 20 mV/A più un piccolo offset, che in genere è di circa 50 mV.
Ciascuna uscita CS è attiva solo mentre il corrispondente ponte H è in modalità drive; è inattivo (basso) quando il canale è in modalità freno (decadimento lento), che si verifica quando l'ingresso PWM è basso o quando è attiva la limitazione di corrente. La corrente continuerà a circolare attraverso il motore quando il driver inizia a frenare, ma la tensione sul pin CS non rifletterà accuratamente la corrente del motore in modalità freno. La tensione CS viene utilizzata internamente dal driver del motore, quindi per evitare di interferire con il funzionamento del driver, non è necessario aggiungere un condensatore a questo pin o collegare un carico che assorba più di pochi mA da esso.
Considerazioni sulla dissipazione di potenza nel mondo reale
I MOSFET sono in grado di gestire grandi picchi di corrente per brevi durate (ad es. 100 A per pochi millisecondi) e il taglio di corrente del driver manterrà la corrente media al di sotto del limite impostato. I valori nominali di picco sono per transitori rapidi (ad es. quando un motore viene acceso per la prima volta) e il valore nominale continuo dipende da varie condizioni, come la temperatura ambiente. Il PWMing del motore introdurrà un riscaldamento aggiuntivo proporzionale alla frequenza. La corrente effettiva che puoi erogare dipenderà da quanto riesci a mantenere fresco il driver del motore. Il circuito stampato del driver è progettato per assorbire il calore dai MOSFET, ma le prestazioni possono essere migliorate aggiungendo un dissipatore di calore o un flusso d'aria. Per le installazioni ad alta corrente, anche i cavi del motore e dell'alimentazione devono essere saldati direttamente invece di passare attraverso le morsettiere fornite, che sono classificate fino a 16 A.
Avvertimento: Questo driver del motore non ha spegnimento per sovratemperatura. Una condizione di sovratemperatura o sovracorrente può causare danno permanente al macchinista. Potresti prendere in considerazione l'utilizzo dell'uscita di rilevamento della corrente integrata del driver (con un ADC esterno) o un sensore di corrente esterno per monitorare l'assorbimento di corrente.
Proprietà
| Marca | Pololu |
| Modello | 3751 |
Consegnato in 5 a 7 giorni
 Driver motore ad alta potenza Pololu Dual G2 18v18 per Raspberry Pi (assemblato) Consegnato in 5 a 7 giorni € 101,55
Driver motore ad alta potenza Pololu Dual G2 18v18 per Raspberry Pi (assemblato) Consegnato in 5 a 7 giorni € 101,55 Prodotti alternativi
- Pololu Driver del motore ad alta potenza G2 24v13 € 61,70 Visualizza prodotto
- Pololu Controller motore Jrk G2 18v19 USB con feedback € 148,- Visualizza prodotto
- Pololu Controller motore semplice ad alta potenza G2 24v12 € 181,30 Visualizza prodotto
- Pololu Dual G2 High-Power Motor Driver 18v22 Shield per Arduino € 141,40 Visualizza prodotto
- Pololu Dual G2 High-Power Motor Driver 18v18 Shield per Arduino € 101,55 Visualizza prodotto
- Driver motore ad alta potenza Pololu G2 24v21 € 77,65 Visualizza prodotto
- Pololu Dual G2 High-Power Motor Driver 24v14 Shield per Arduino € 108,20 Visualizza prodotto
- Pololu Controller motore semplice ad alta potenza G2 18v15 (connettori saldati) € 124,85 Visualizza prodotto
- Pololu Controller motore Jrk G2 18v27 USB con feedback € 132,40 Visualizza prodotto
- Pololu Dual G2 Driver motore ad alta potenza 18v22 per Raspberry Pi (kit parziale) € 128,10 Visualizza prodotto
- Driver del motore ad alta potenza Pololu G2 18v17 € 61,70 Visualizza prodotto
- Pololu Controller motore Jrk G2 24v13 USB con feedback € 148,- Visualizza prodotto
- Pololu Controller motore semplice ad alta potenza G2 24v19 € 145,40 Visualizza prodotto
- Driver motore ad alta potenza Pololu Dual G2 24v14 per Raspberry Pi (kit parziale) € 101,55 Visualizza prodotto
- Pololu Dual G2 Driver motore ad alta potenza 18v18 per Raspberry Pi (kit parziale) € 94,90 Visualizza prodotto
- Pololu Dual G2 High-Power Motor Driver 24v18 Shield per Arduino € 141,40 Visualizza prodotto
- Pololu High-Power Simple Motor Controller G2 24v12 (connettori saldati) € 124,95 Visualizza prodotto
- Pololu Controller motore semplice ad alta potenza G2 18v15 € 181,30 Visualizza prodotto
- Driver motore ad alta potenza Pololu Dual G2 24v18 per Raspberry Pi (kit parziale) € 128,10 Visualizza prodotto
- Driver motore ad alta potenza Pololu G2 18v25 € 77,65 Visualizza prodotto
- Pololu Controller motore Jrk G2 21v3 USB con feedback (connettori saldati) € 77,65 Visualizza prodotto
- Pololu Controller motore semplice ad alta potenza G2 18v25 € 145,70 Visualizza prodotto
- Pololu Controller motore Jrk G2 24v21 USB con feedback € 201,15 Visualizza prodotto
- Pololu Dual G2 Driver motore ad alta potenza 24v14 per Raspberry Pi (assemblato) € 108,20 Visualizza prodotto
Domande dei clienti
recensioni dei clienti
- Ridotto disponibile -50 % Pololu DRV8838 Supporto per driver motore CC a spazzola singola € 7,- € 3,50 Visualizza prodotto
- Ridotto disponibile -50 % Regolatore di tensione step-up Pololu 3.3V U1V10F3 € 9,80 € 4,90 Visualizza prodotto
- Ridotto disponibile -50 % Regolatore di tensione step-down Pololu 3,3 V, 500 mA D24V5F3 € 12,60 € 6,30 Visualizza prodotto
- Ridotto disponibile -50 % Pololu Regolatore di tensione step-up/discendente 5V S18V20F5 € 42,20 € 21,10 Visualizza prodotto
- Ridotto disponibile -50 % Pololu Regolatore di tensione step-up 5V U3V16F5 € 9,80 € 4,90 Visualizza prodotto
- Ridotto disponibile -49 % Pololu Cavo a nastro Premium Jumper Wires 10 colori FF 6" (15 cm) € 4,05 € 2,05 Visualizza prodotto
- Ridotto 3 pieces disponibile -50 % Pololu Morsettiera senza viti: 3 pin, passo 0,1″, ingresso laterale (confezione da 3) € 3,60 € 1,80 Visualizza prodotto
- Ridotto disponibile -50 % Pololu Cavo a trefoli: rosso, 28 AWG, 90 piedi € 14,10 € 7,05 Visualizza prodotto
- Ridotto disponibile -50 % Coppia di ruote Pololu 32×7mm - Bianco € 6,30 € 3,15 Visualizza prodotto
- Ridotto disponibile -49 % Pololu Mini interruttore a scorrimento: 3 pin, SPDT, 0,3 A (confezione da 3) € 3,35 € 1,70 Visualizza prodotto
- Ridotto disponibile -50 % Pololu Regolatore di tensione step-down da 5 V, 500 mA D24V5F5 € 12,60 € 6,30 Visualizza prodotto
- Ridotto disponibile -48 % Pololu Connettore maschio separabile da 0,100" (2,54 mm): 1×40 pin, dritto, bianco € 1,55 € 0,80 Visualizza prodotto
- Ridotto disponibile -50 % Pololu Filo intrecciato: bianco, 20 AWG, 40 piedi € 16,85 € 8,45 Visualizza prodotto
- Ridotto disponibile -50 % Pololu Distanziatore in nylon: lunghezza 4 mm, diametro esterno 4 mm, diametro interno 2,7 mm (confezione da 50) € 4,70 € 2,35 Visualizza prodotto
- Ridotto disponibile -50 % Regolatore di tensione step-down Pololu 9V, 1A D24V10F9 € 18,30 € 9,15 Visualizza prodotto