









Sensore Sparkfun RedBot - Paraurti meccanico
Descrizione Allegati
Il sensore meccanico del paraurti è dotato di un connettore a tre pin. Ciò consente una connessione diretta alla scheda madre RedBot utilizzando cavi ponticello femmina-femmina. Con la libreria RedBot, è facile programmare il tuo robot per aggirare gli ostacoli in modo efficiente.
È importante notare che la maggior parte dei tutorial di RedBot consiglia di utilizzare due sensori paraurti meccanici. Tienilo a mente quando decidi la quantità del tuo ordine.
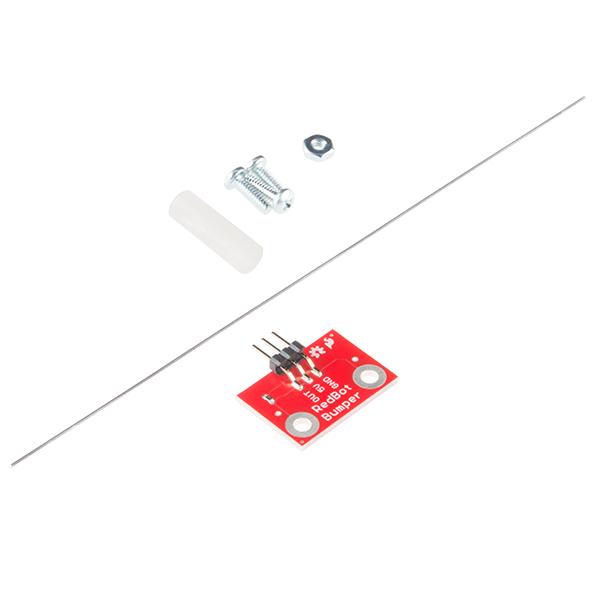
Il pacchetto include:
- Una scheda paraurti meccanica
- Un Baffo
- Un distanziatore in nylon 4-40 da 19,05 mm
- Un dado esagonale 4-40
- Tre viti a macchina Phillips 4-40 da 9,53 mm
Il sensore del paraurti meccanico presenta dimensioni compatte di 26,27 x 17,67 mm, che lo rendono perfetto per il tuo RedBot.
Per informazioni più dettagliate, è possibile accedere allo schema, ai file Eagle, alla Guida all'esperimento RedBot, alla Guida all'assemblaggio del telaio Shadow RedBot e a GitHub dal sito Web Sparkfun . Puoi anche guardare il video del prodotto per vedere il sensore meccanico del paraurti in azione.
Il sensore Sparkfun RedBot - Paraurti meccanico è una piccola aggiunta che può fare una grande differenza per le prestazioni del tuo robot. È uno strumento essenziale per qualsiasi costruttore di robot che desideri migliorare la navigazione del proprio RedBot ed evitare potenziali collisioni.
Proprietà
| Marca | Sparkfun |
| Modello | SEN-11999 |
| Ulteriori informazioni | GitHub - sparkfun/RedBot_Whisker_Bumper: Super-simple board to provide the RedBot with a mechanical whisker to detect collisions. |
| Lunghezza | 100 mm |
| Larghezza | 130 mm |
| Altezza | 7 mm |
| Il peso | 14,2 g |
Consegnato in 5 a 7 giorni
 Sensore Sparkfun RedBot - Paraurti meccanico Consegnato in 5 a 7 giorni € 4,90
Sensore Sparkfun RedBot - Paraurti meccanico Consegnato in 5 a 7 giorni € 4,90 Domande dei clienti
recensioni dei clienti
- Ridotto disponibile -49 % Sparkfun Jack audio da 3,5 mm € 2,55 € 1,30 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Kit connettori Raspberry Pi Pico € 2,30 € 1,15 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Portabatterie: 1xAAA (PTH) € 0,80 € 0,40 Visualizza prodotto
- Ridotto disponibile -45 % Sparkfun Condensatore ceramico 0,1uF € 0,55 € 0,30 Visualizza prodotto
- Ridotto disponibile -49 % Sparkfun Kit testata impilabile Arduino - R3 € 4,05 € 2,05 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Interruttore a bilanciere - SPST (angolo retto) € 1,80 € 0,90 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Basette staccabili: maschio a 40 pin (centrato lungo, PTH, 0,1") € 2,30 € 1,15 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Level Shifting microSD Breakout € 9,10 € 4,55 Visualizza prodotto
- Ridotto disponibile -50 % Breakout IMU Micro 6DoF Sparkfun - BMI270 (Qwiic) € 24,45 € 12,25 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Arduino Pro Mini 328 - 5V/16MHz € 15,65 € 7,85 Visualizza prodotto
- Ridotto disponibile -50 % Breakout del sensore di linea Sparkfun - QRE1113 (digitale) € 6,30 € 3,15 Visualizza prodotto
- Ridotto 2 pieces disponibile -49 % Sparkfun Set di testate impilabili ESP32 Thing € 3,55 € 1,80 Visualizza prodotto
- Ridotto disponibile -49 % Sparkfun Cavo di collegamento - Giallo (22 AWG) € 4,55 € 2,30 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Cavo di collegamento - Marrone (22 AWG) € 5,30 € 2,65 Visualizza prodotto
- Ridotto disponibile -50 % Sparkfun Puntali a coccodrillo - Multicolore (confezione da 10) € 7,35 € 3,70 Visualizza prodotto